作為實現(xiàn)"不碰撞汽車"技術開發(fā)的一個環(huán)節(jié),EPORO是運用魚群的運動規(guī)律進行集體行駛的機器人汽車。通過利用通信了解相互間的狀態(tài),實現(xiàn)了可靈活適應周圍環(huán)境的魚群式行駛,自此高度信息化的汽車界提出了松散連接的"社會體系"的構想。

開發(fā)出了作為實現(xiàn)"不碰撞汽車"技術開發(fā)的一個環(huán)節(jié),運用魚群的運動規(guī)律進行集體行駛的機器人汽車——EPORO
特點
魚可以在躲避障礙物的同時,密集地游走。這是根據(jù)與自己距離最近的同伴位置,依據(jù)回避碰撞、并列游走、相互接近這三個原則來改變動作的。日產(chǎn)將魚群三原則運用到機器人汽車上,形成可自由變換隊形的群體,實現(xiàn)了安全有效的行駛。

技術簡介
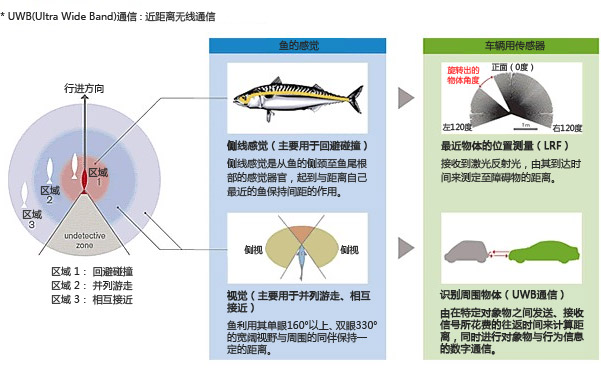
魚主要是以"側線感覺"和"視覺"作為傳感器來識別周圍的狀態(tài)。利用測量激光的反射光至障礙物距離的"激光測距儀"( LRF),實現(xiàn)了"側線感覺"的作用。此外,利用由發(fā)送脈沖信號并得到反射的時間差來測量對象物位置的 "UWB(超寬帶)通信技術*",實現(xiàn)了"視覺"的作用。將這兩個周圍環(huán)境識別技術和魚群游走三原則(回避碰撞、并列游走、相互接近)相結合,運用在機器人汽車上,就可以形成如同魚群一樣自由改變隊形的行駛。* UWB(Ultra Wide Band)通信:近距離無線通信。
日產(chǎn)中國官網(wǎng)將使用Cookie技術為您帶來更好的網(wǎng)站體驗,如果您瀏覽此站點,即表示您同意我們使用該技術。更多內(nèi)容請參閱 《日產(chǎn)中國隱私政策》 。